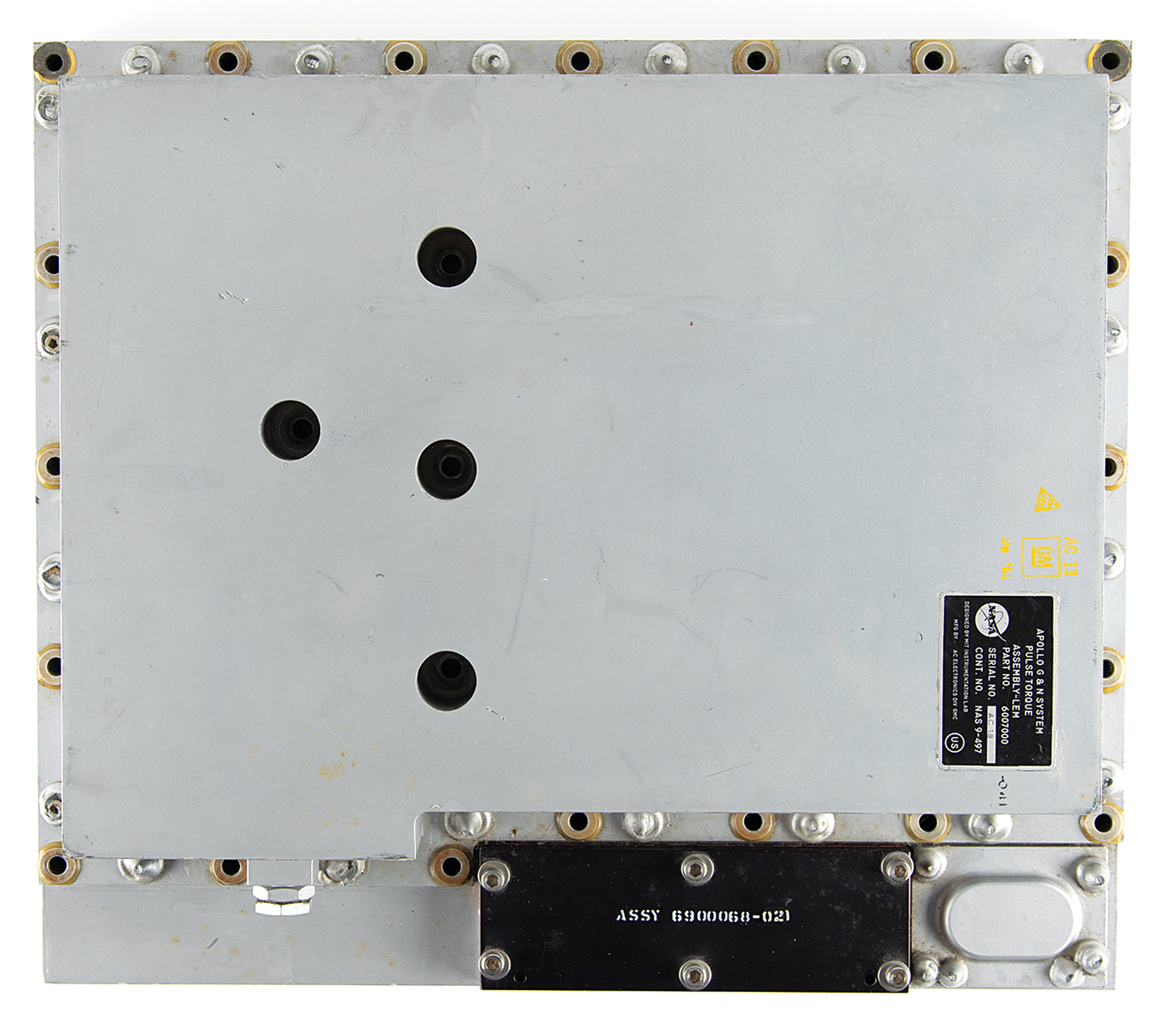
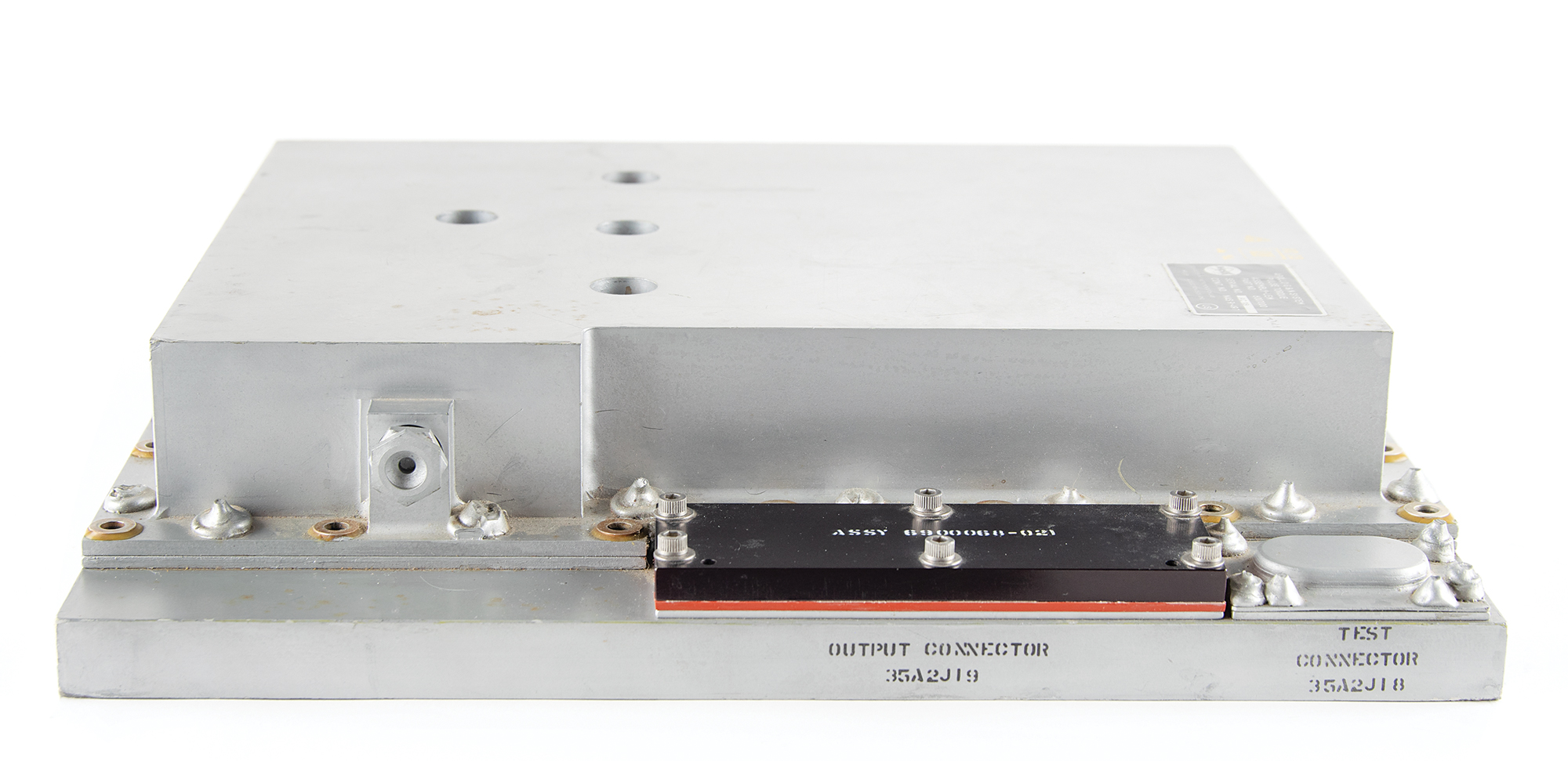
Apollo Lunar Module Guidance & Navigation System Pulse Torque Assembly, measuring 11.25″ x 12.75″ x 3″, with NASA/MIT Instrumentation Lab label applied to the upper right corner: "Apollo G & N System, Pulse Torque Assembly - LEM, Part No. 6007000, Serial No. AC-18, Cont. No. NAS 9-497." In fine condition.
The Apollo Inertial Measurement Units (IMUs) were identical in the Command Module and Lunar Module, using a trio of gyroscopes and accelerometers to determine the position of the spacecraft. Gyroscopes mounted on an internal platform—the 'stable member'—would sense rotations in three axes and the guidance system would use motors in the IMUs to keep the position of the platform fixed despite rotational movement of the spacecraft. The accelerometers could then precisely measure the linear acceleration of the spacecraft in those three axes. The accelerometers in the Apollo IMUs were called pulsed integrating pendulous accelerometers, or PIPAs. These had a pendulum inside. Acceleration of the spacecraft would cause the accelerometer to accelerate with it, but the pendulum inside would then be in a different position relative to the case because of its inertia—effectively resisting that motion. As Isaac Newton said, a mass 'stays in the same place or moves at a constant speed unless acted upon by an outside force.'
The Pulse Torque Assembly would then produce pulses in the coils around the pendulum to return it to its steady-state position. The number of pulses needed to do this was a measure of the acceleration. This electronic assembly provided those pulses and determined when the pendulum had returned to its steady-state position. The PIPA, as the name says, is an 'integrating' accelerometer. If you integrate acceleration, the result is velocity. The Apollo computer would have this velocity data from the accelerometers and, by integrating it a second time, could get the change in distance the accelerometer has measured. This assembly was a critical part of the Apollo Lunar Module guidance system.