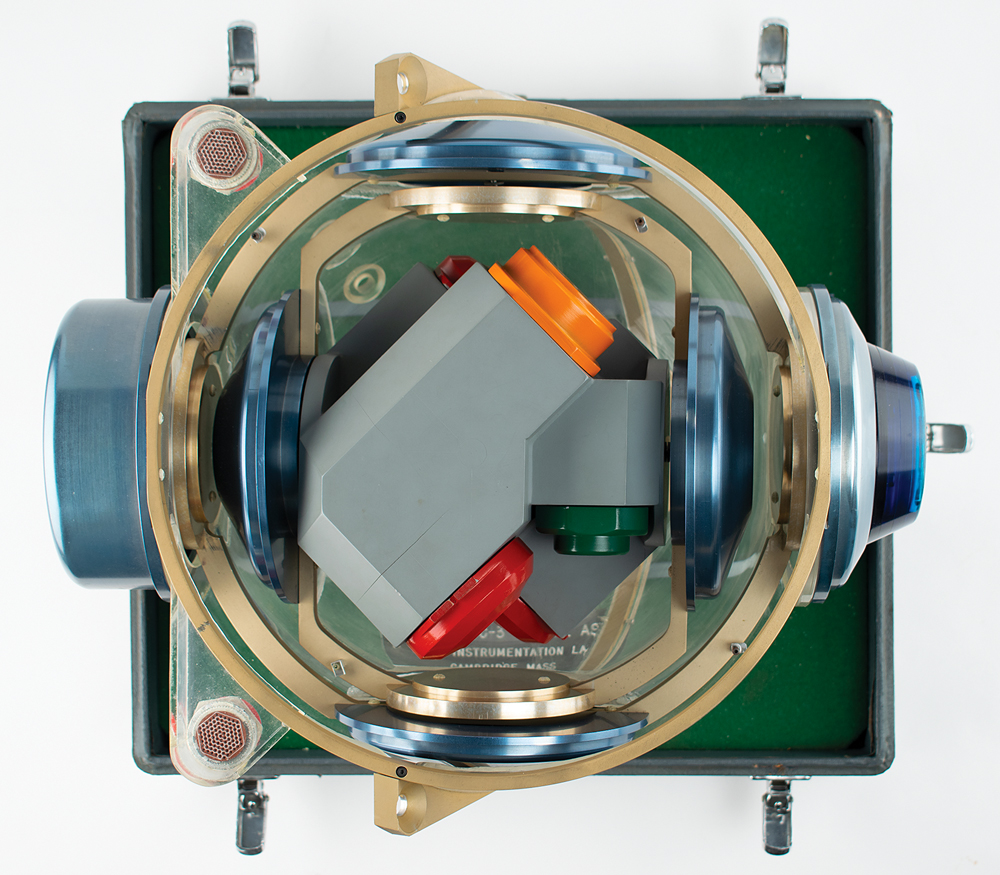
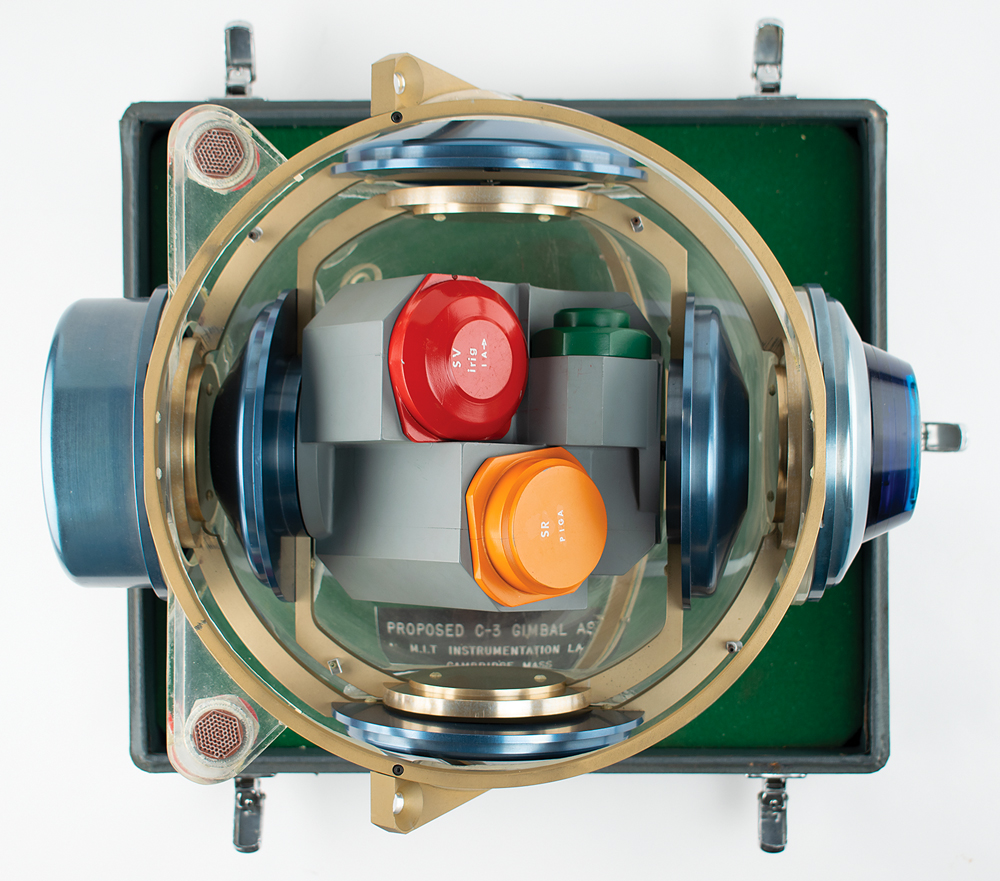
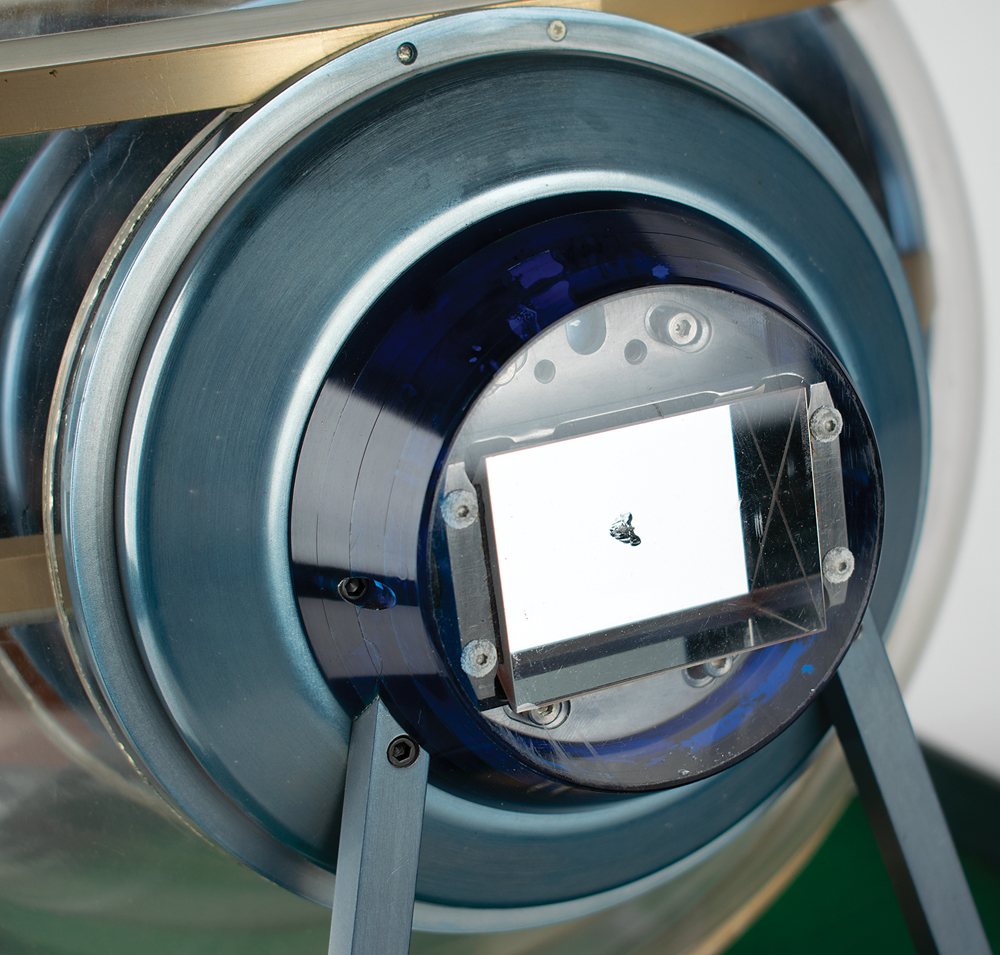
Large, impressive, and well-made model of MIT's proposed C-3 Inertial Measurement Unit (IMU) and gimbal assembly, mounted in a custom-made transport case. The top clear cover of the IMU lifts off, and the outer gimbal and stable member can rotate; the middle gimbal is fixed. The outer blue anodized gimbal assemblies are machined aluminum, and one has a prism that would have been for platform alignment. Inside the IMU, there are three gyro and three accelerometer mockups made of painted wood and secured by magnets; an affixed placard identifies the inertial components: "3-SIZE 24 GYROS, 2-SIZE 16P.M.PIPS, 1-SIZE16PIGA." The base bears an identification plaque: "Proposed C-3 Gimbal Assy, MIT Instrumentation Lab, Cambridge, Mass." Overall, the carrying case measures 17″ x 15″ x 15″. In very good to fine condition, with unobtrusive cracks where the outermost plastic assemblies (with red connectors) attach to the main sphere; the case should not be locked, as the combination is unknown.
Known as the 'father of inertial navigation,' Dr. Charles Stark 'Doc' Draper of MIT's Instrumentation Lab pioneered the use of gyroscopes and accelerometers to measure a spacecraft's movement within a stable frame of reference. This proposed IMU was evidently intended for the Poseidon C-3 nuclear missile, but the concept is like that used on the Apollo spacecraft. Derived from the guidance system that Draper had developed for the Polaris missile, the Apollo Inertial Measurement Unit (IMU) was able to keep track of the spacecraft's velocity and position, relaying that information to the Apollo Guidance Computer (AGC) so that any necessary corrections to the spacecraft's trajectory could be made.
The gyros called for on this model (Size 24) are just a bit smaller than the Apollo gyros (Size 25), numbers referring to their diameter in 1/10th inches. The accelerometers are two “PIPs” which are the same size (16) as the Apollo PIPAs and are very likely the same design. The Apollo PIPAs are derived from the Polaris PIPA. The third accelerometer—a size 16 PIGA (pulsed integrating gyro accelerometer) is very interesting as they use an unbalanced gyroscope. Acceleration then causes the unbalanced gyro to precess and that generates rotational movement of the gyro—that movement is used to determine acceleration. This design is supposed to be more accurate than a conventional pendulous accelerometer (like the PIPAs). This IMU design likely had that accelerometer sensing the axis most important for trajectory accuracy.
We use cookies on this site to improve your experience. By using this site, you accept our use of cookies. To learn more, please see our Privacy Policy.