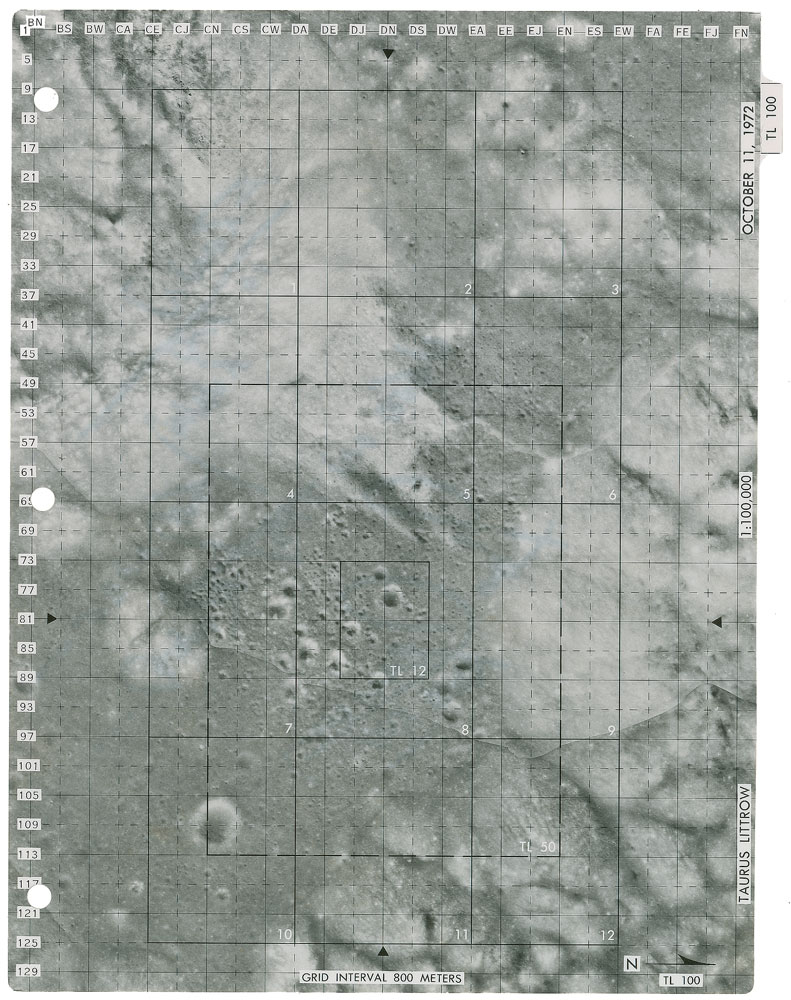
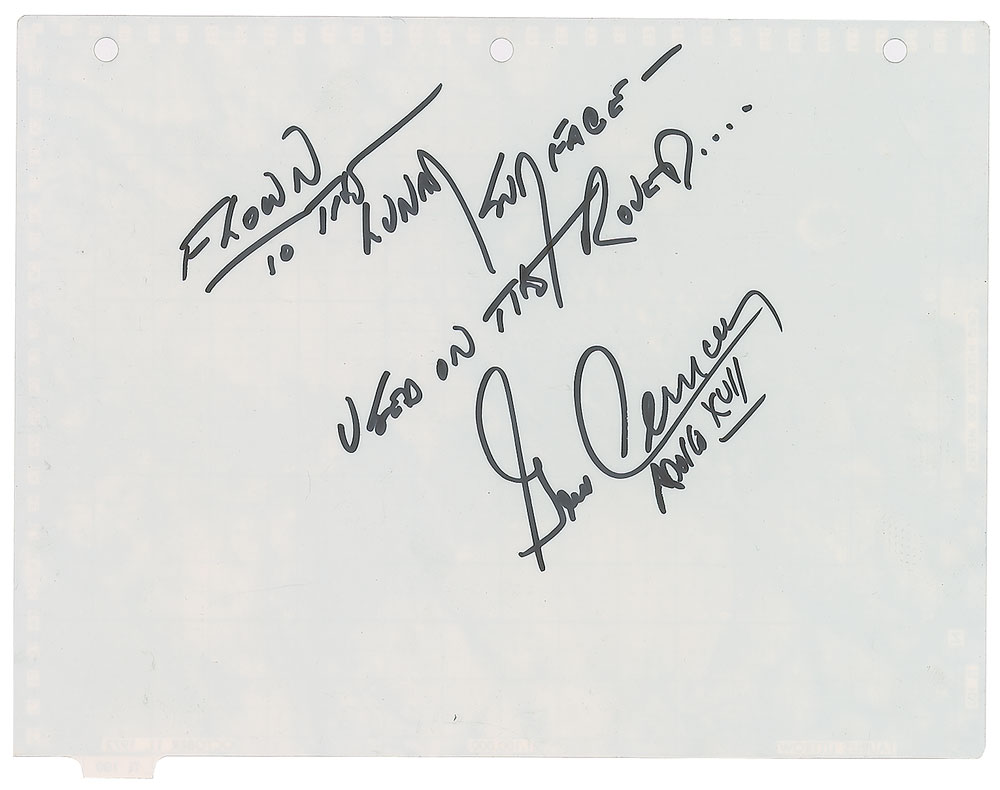
Remarkable photographic lunar map used on the surface of the moon during Apollo 17, labeled "Taurus Littrow," with a tab marked "TL100," one page, 10.5 x 8.25, signed and flight-certified on the reverse in black felt tip, "Flown to the Lunar Surface—Used on the Rover….Gene Cernan, Apollo XVII." The important map shows the planned Apollo 17 landing site in the Taurus-Littrow valley. In fine condition.
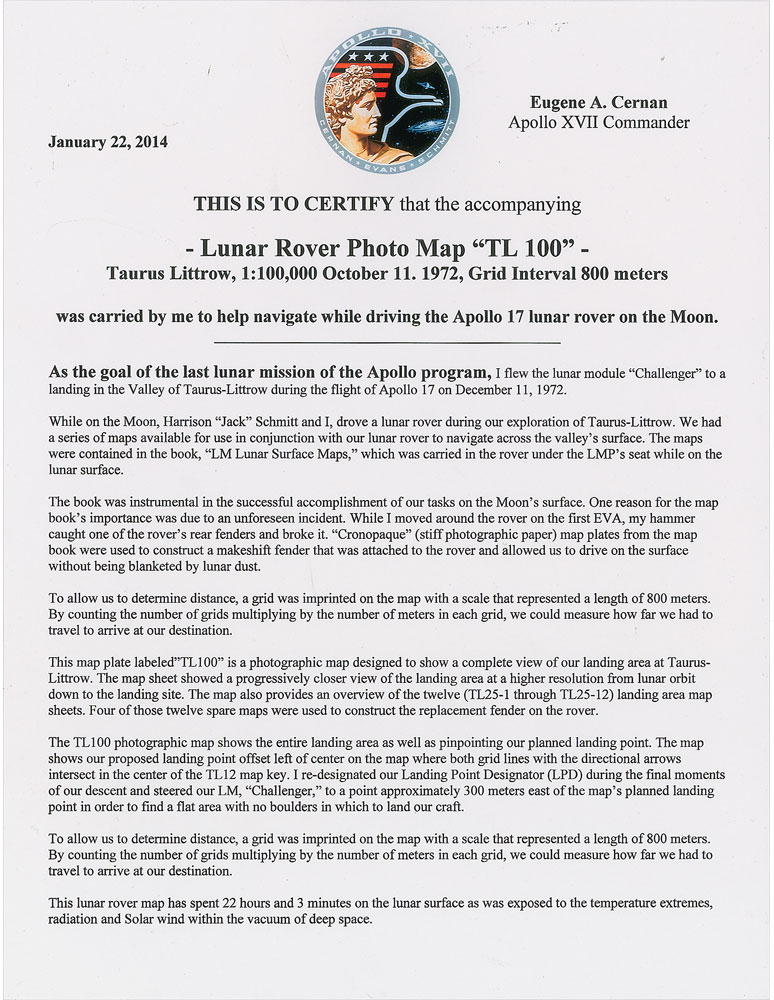
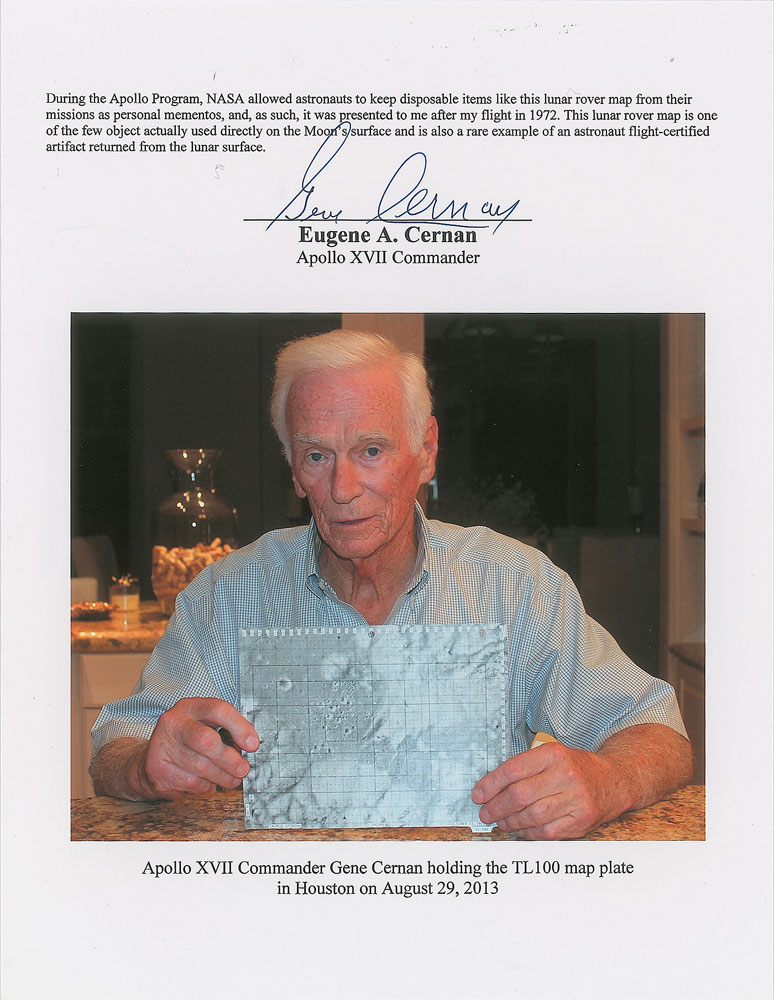
Accompanied by a detailed signed letter of provenance from Cernan, as well as a photo of him holding the map. In part: “This is to certify that the accompanying Lunar Rover Photo Map ‘TL 100,’ Taurus Littrow, 1:100,000, October 11, 1972, Grid Interval 800 meters, was carried by me to help navigate while driving the Apollo 17 lunar rover on the Moon. As the goal of the last lunar mission of the Apollo program, I flew the lunar module ‘Challenger’ to a landing in the Valley of Taurus-Littrow during the flight of Apollo 17 on December 11, 1972.
While on the Moon, Harrison ‘Jack’ Schmitt and I, drove a lunar rover during our exploration of Taurus-Littrow. We had a series of maps available for use in conjunction with our lunar rover to navigate across the valley’s surface. The maps were contained in the book, ‘LM Lunar Surface Maps,’ which was carried in the rover under the LMP’s seat while on the lunar surface. The book was instrumental in the successful accomplishment of our tasks on the Moon’s surface. One reason for the map book’s importance was due to an unforeseen incident. While I moved around the rover on the first EVA, my hammer caught one of the rover’s rear fenders and broke it. ‘Cronopaque’ (stiff photographic paper) map plates from the map book were used to construct a makeshift fender that was attached to the rover and allowed us to drive on the surface without being blanketed by lunar dust…
This map plate labeled ‘TL100’ is a photographic map designed to show a complete view of our landing area at Taurus-Littrow. The map sheet showed a progressively closer view of the landing area at a higher resolution from lunar orbit down to the landing site. The map also provides an overview of the twelve (TL25-1 through TL25-12) landing area map sheets. Four of those twelve spare maps were used to construct the replacement fender on the rover.
The TL100 photographic map shows the entire landing area as well as pinpointing our planned landing point. The map shows our proposed landing point offset left of center on the map where both grid lines with the directional arrows intersect in the center of the TL12 map key. I re-designated our Landing Point Designator (LPD) during the final moments of our descent and steered our LM, ‘Challenger,’ to a point approximately 300 meters east of the map’s planned landing point in order to find a flat area with no boulders in which to land our craft.
To allow us to determine distance, a grid was imprinted on the map with a scale that represented a length of 800 meters. By counting the number of grids multiplying by the number of meters in each grid, we could measure how far we had to travel to arrive at our destination. This lunar rover map has spent 22 hours and 3 minutes on the lunar surface [and] was exposed to the temperature extremes, radiation and Solar wind within the vacuum of deep space.” As one of few objects used directly on the surface of the moon and returned to Earth, this photographic map of the Apollo 17 landing site—the last manned lunar voyage—is of the utmost historical significance.

This item is Pre-Certified by STEVE ZARELLI
Buy a third-party letter of authenticity for
$35.00
*This item has been pre-certified by a trusted third-party authentication service, and by placing a bid on this item, you agree to accept the opinion of this authentication service. If you wish to have an opinion rendered by a different authenticator of your choosing, you must do so prior to your placing of any bid. RR Auction is not responsible for differing opinions submitted 30 days after the date of the sale.